
複数の台車が同時に稼働する搬送システムでは、将来の混雑や台車の空き状況を事前に把握できないことが、効率低下や待機時間の増加につながっていました。
従来は、リアルタイム制御に依存しており、事前の予測に基づく計画的な制御は困難でした。
この課題を解決するため、台車群の将来挙動を予測し、その情報を搬送制御や空台車制御に活用する技術が求められています。
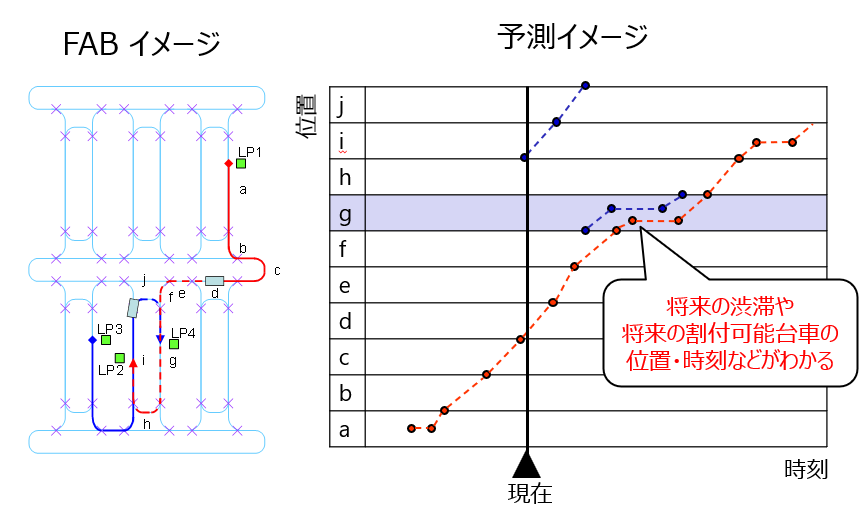
本技術では、各台車が今後通過する走行経路の情報を与え、その経路上で他の台車とどのように交錯・待機が発生するかを考慮しながら、各区間への到着予定時刻を予測します。
これにより、複数台車が同時に動作する環境においても、将来の挙動を時系列で見通すことが可能になります。
予測された到着予定時刻をもとに、将来の混雑度合いや空き台車の分布を把握し、それらの情報を搬送制御および空台車制御に活用します。
さらに、将来発生しうる渋滞や、割付可能な台車の位置・時刻を事前に見積もることで、搬送要求に対する予約制の割付が可能となります。
こうした予測情報の活用により、台車数が限られた環境であっても、効率的な搬送の成立を支援します。
この技術は、搬送システムの計画性を高め、台車の稼働率向上や待機時間削減に寄与します。
将来的には、スマートファクトリーや大規模物流システムにおいて、AIによる最適化と組み合わせることで、より高度な搬送計画や省エネ運用が可能になると考えられます。
特に、予約機能を活用した搬送制御は、限られた台車リソースで高い搬送性能を維持するための有効な手段として期待されています。

